PMF
Beskrivning
Antag att du mäter luftföroreningar med ett 40-kanaligt instrument. Du har gjort mätningar vid 20 tillfällen. Då får du en 20 × 40-matris (tider × mätvärden) med data. Du antar också att det är 4 emissionskällor, och att varje källas emmissionsprofil är konstant men amplituden varierar med tiden. Går det då att utifrån mätdata lista ut de olika källornas emmissionsprofiler, konstanta över tiden, och amplituder över tiden? Ja, förstås! Metoden kallas ”Positive Matrix Factorisation” (PMF) (se PMF-Exempel 1).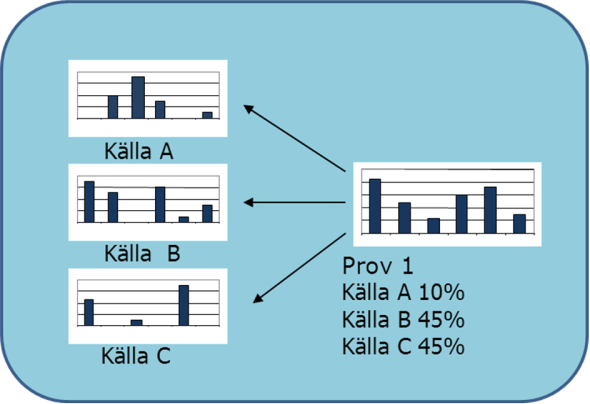
Figur 1. Ett exempel där ett prov kan delas upp i tre stycken ingående källor.
PMF är ett multivariat faktoranalysverktyg. PMF bygger på att det går att utnyttja att olika källor har sinsemellan olika, men konstant, sammansättning med avseende på de variabler som analyseras medan amplituden varierar mellan mätningarna. Denna information kan användas för att identifiera antal källor som bidrar till de observerade halterna, samt deras karaktär/emissonsprofiler med avseende på tidsvariation och bidrag till de olika variablerna (Figur 1). PMF och andra receptormodeller har tidigare mest används på data för luftemissioner men har under senare tid även börjat användas på andra data.
För att kunna utföra en analys med PMF krävs förutom mätdata även osäkerheten för dessa data, antingen som en formel eller som en matris med individuella data. Med hjälp av osäkerhetsmatrisen viktas proverna vid passningen av modellen så att osäkra datapunkter, t.ex. värden under eller nära detektionsgränsen, får låg inverkan på modellen, vilket avsevärt förbättrar modellresultatets robusthet. Den osäkerhet som uppkommer på grund av osäkerhet i de data som används i analysen kan beräknas genom felfortplantning i modellen. Detta görs automatiskt i varje analys. Resultatet erhålls som standardavvikelser för alla element i de faktorer som extraheras. Beräkningarna bygger på att skattningarna av osäkerheten i mätdata är riktig.
Exempel
PMF-Exempel 1: GE, ett simulerat dataset med 4 gaussformade och exponentiellt avtagande källor och 1 receptor.PMF-Exempel 2: Analyser av partikelfraktionen PM10 från Hornsgatan i Stocklholm.
Viktigt att veta
Uppskattningen av osäkerheten i mätdata är av yttersta vikt då den påverkar resultat och tolkningen av de beräknade källorna.Fallgropar
Resultat från PMF och liknande tekniker är oftast förknippade med en s.k. rotationsosäkerhet vilket kan visa sig som att man ibland inte erhåller profiler för rena källor utan kombinationer av flera källor. Genom att variera en parameter i analysen (kallad FPEAK) kan olika rotationslösningar studeras. Därmed kan storleken på rotationsosäkerheten uppskattas. En lösning som ger god förklaring av variationen i data och den mest relevanta fysikaliska tolkningen antas sedan bäst representera verkliga källor och deras bidrag.Detaljer
Algoritm
PMF2 används för att lösa det 2-dimensionella problemet med hjälp av följande bilinjära modell:X = GF + E
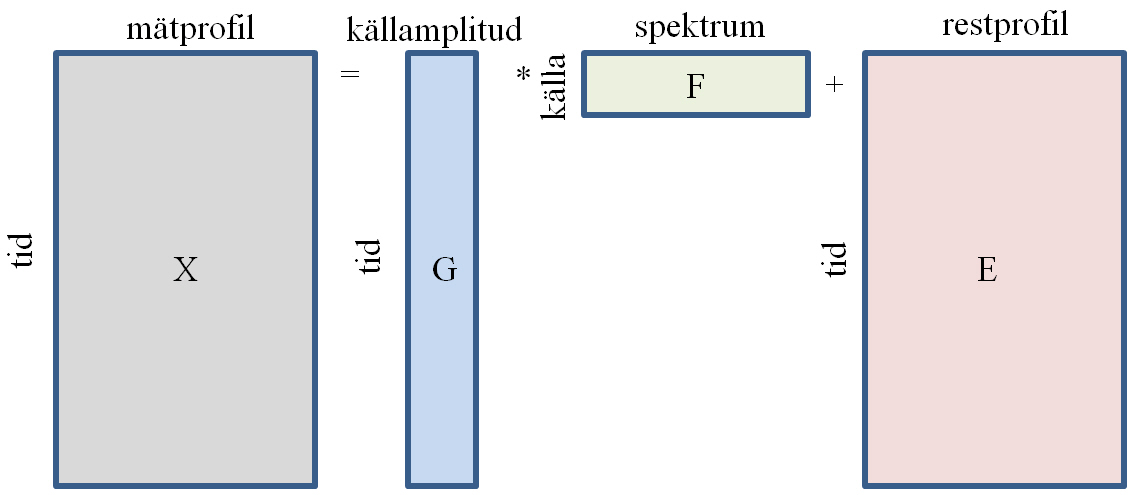
Där X är den uppmätta datamatrisen, G, källamplituderna med en kolumn per källa, och F, källspektra med en rad per källa, är matriserna som ska bestämmas och E är residualen. Elementen av G and F begränsade till att endast anta positiva värden vilket innebär att ingen källa kan avge något negativt bidrag till de uppmätta värdena. Antalet faktorer i PMF motsvarar antalet källor.
Eller i komponentform:
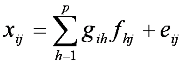
Uttrycket som minimeras är följande kvadratsumma:
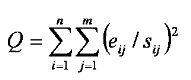
med bivillkoret att inga element i G och F får vara < 0.
Hantering av värden under detektionsgräns och saknade värden
Med hjälp av denna viktas proverna vid passningen av modellen så att osäkra datapunkter, t.ex. värden under eller nära detektionsgränsen, får låg inverkan på modellen, vilket avsevärt förbättrar modellresultatet. Dessutom kan PMF även hantera outliers med hjälp av s.k. winzorising, vilket i korthet innebär att om en datapunkt får ett skattningsfel (residual) som är större än 4 standardavvikelser (i typfallet), så ges den inte större inflytande på modellen än om den hade exakt så stor avvikelse. Detta medför att avvikande prover, t.ex. p.g.a. kontamination, inte får så stor påverkan på modellen.Programvara
PMF2, Utveckalad av Pentti Paatero, University of HelsinkiEPA, Positive Matrix Factorization 3.0 Software
